Qt is a cross-platform C++ framework for developing applications with graphical user interfaces (GUIs). In this tutorial, you’ll learn how to create a robust, production-ready barcode scanner application using Qt 6, Microsoft Visual C++ (MSVC), and the Dynamsoft Barcode Reader C++ SDK on Windows. This tutorial covers everything from environment setup to implementing advanced features like real-time camera scanning and visual barcode overlays.
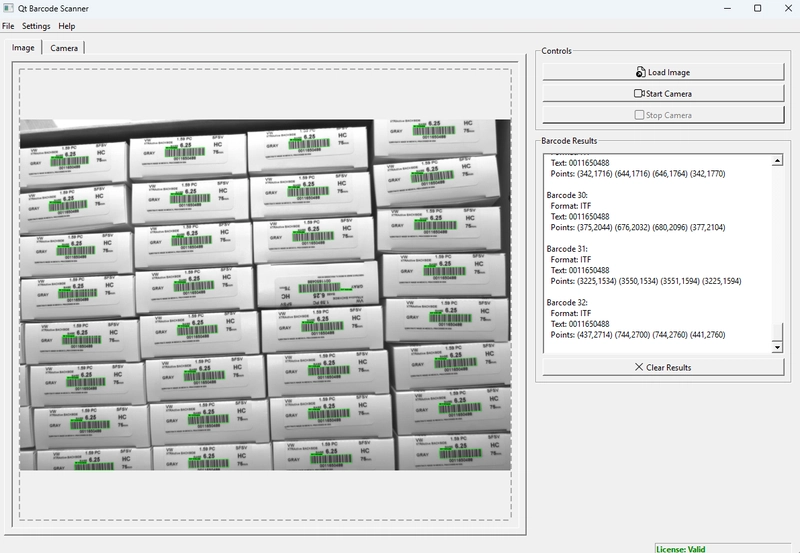
Demo: Qt Barcode Scanner for Windows
Prerequisites
What You’ll Build
By the end of this tutorial, you’ll create a barcode scanner application with these features:
- Dual-mode scanning: Image file scanning and real-time camera scanning
- Visual feedback: Live barcode detection overlays with bounding boxes
- Multiple format support: Support for 1D and 2D barcodes (QR codes, Code 128, DataMatrix, etc.)
- Drag-and-drop functionality: Easy image loading via drag-and-drop

Step 1: Environment Setup
1.1 Install Qt 6 with MSVC
Download and install Qt 6 from the official Qt installer:
- Run the Qt Online Installer.
- Select Qt 6.7.2 or later.
- Choose MSVC 2019/2022 64-bit component.
-
Install to
C:\Qt\6.7.2\msvc2022_64# Set Qt environment variable set Qt6_DIR=C:\Qt\6.7.2\msvc2022_64\lib\cmake\Qt6
1.2 Install OpenCV
Download OpenCV 4.8.0 from opencv.org:
- Download the Windows release
- Extract to
C:\opencv -
Set environment variable:
set OpenCV_DIR=C:\opencv\build
Step 2: Project Structure and CMake Configuration
2.1 Create Project Directory
mkdir qt-barcode-scanner
cd qt-barcode-scanner
2.2 CMakeLists.txt Configuration
Create a CMakeLists.txt file that handles all dependencies:
cmake_minimum_required(VERSION 3.16)
project(QtBarcodeScanner VERSION 1.0 LANGUAGES CXX)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# Find Qt6 components
find_package(Qt6 REQUIRED COMPONENTS Core Widgets Multimedia MultimediaWidgets)
# Enable Qt MOC, UIC, and RCC
set(CMAKE_AUTOMOC ON)
set(CMAKE_AUTOUIC ON)
set(CMAKE_AUTORCC ON)
# OpenCV for camera support - always enabled
find_package(OpenCV REQUIRED)
if(OpenCV_FOUND)
message(STATUS "OpenCV found: ${OpenCV_VERSION}")
endif()
# Source files
set(SOURCES
main.cpp
mainwindow.cpp
mainwindow.h
mainwindow.ui
barcodeworker.cpp
barcodeworker.h
opencvcamera.cpp
opencvcamera.h
)
# Create executable
add_executable(QtBarcodeScanner ${SOURCES})
# Link Qt libraries
target_link_libraries(QtBarcodeScanner
Qt6::Core
Qt6::Widgets
Qt6::Multimedia
Qt6::MultimediaWidgets
)
# Link OpenCV
if(OpenCV_FOUND)
target_link_libraries(QtBarcodeScanner ${OpenCV_LIBS})
target_include_directories(QtBarcodeScanner PRIVATE ${OpenCV_INCLUDE_DIRS})
endif()
# Dynamsoft SDK configuration
set(DCV_ROOT "${CMAKE_CURRENT_SOURCE_DIR}/../../dcv")
target_include_directories(QtBarcodeScanner PRIVATE "${DCV_ROOT}/include")
if(WIN32)
target_link_libraries(QtBarcodeScanner
"${DCV_ROOT}/lib/win/DynamsoftCaptureVisionRouter.lib"
"${DCV_ROOT}/lib/win/DynamsoftCore.lib"
"${DCV_ROOT}/lib/win/DynamsoftUtility.lib"
"${DCV_ROOT}/lib/win/DynamsoftLicense.lib"
)
endif()
# Post-build DLL and resource copying
if(WIN32)
# Copy Qt platform plugins
add_custom_command(TARGET QtBarcodeScanner POST_BUILD
COMMAND ${CMAKE_COMMAND} -E make_directory
"$/platforms"
COMMAND ${CMAKE_COMMAND} -E copy_directory
"${Qt6_DIR}/../../../plugins/platforms"
"$/platforms"
)
# Copy complete DLL directory
add_custom_command(TARGET QtBarcodeScanner POST_BUILD
COMMAND ${CMAKE_COMMAND} -E copy_directory
"${DCV_ROOT}/lib/win"
"$"
)
endif()
Key Configuration Points:
- Automatic MOC/UIC/RCC: Essential for Qt meta-object compilation
- Complete DLL copying: Ensures all Dynamsoft libraries are available
- Plugin directory copying: Required for Qt platform plugins
- Conditional compilation: Enables camera features based on available components
Step 3: Core Application Structure
3.1 Main Window Header (mainwindow.h)
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include
3.2 Barcode Worker Implementation
The BarcodeWorker class handles barcode detection in a separate thread to prevent UI blocking:
// barcodeworker.h
#ifndef BARCODEWORKER_H
#define BARCODEWORKER_H
#include
Key Implementation Details:
- Thread Safety: All barcode processing happens in a worker thread
-
Dynamsoft Integration: Implements
CCapturedResultReceiverfor result callbacks - Signal-Slot Communication: Uses Qt signals for thread-safe communication
- License Management: Handles Dynamsoft license initialization and validation
Step 4: Implementing the Barcode Worker
4.1 Worker Initialization and License Setup
// barcodeworker.cpp
void BarcodeWorker::initialize()
{
try
{
char errorMsgBuffer[512];
int ret = CLicenseManager::InitLicense(m_licenseKey.toUtf8().constData(), errorMsgBuffer, 512);
if (ret != EC_OK)
{
QString errorMsg = QString::fromUtf8(errorMsgBuffer);
emit licenseStatusChanged(QString("License: Failed (%1)").arg(errorMsg), false);
}
else
{
emit licenseStatusChanged("License: Valid", true);
}
m_router = new CCaptureVisionRouter();
if (!m_router)
{
return;
}
m_router->AddResultReceiver(this);
m_initialized = true;
}
catch (const std::exception &e)
{
m_initialized = false;
}
}
4.2 Image Processing Implementation
void BarcodeWorker::processImage(const QImage &image)
{
if (!m_initialized || !m_router || image.isNull())
{
if (!m_initialized)
{
initialize();
if (!m_initialized)
{
emit resultsReady(QList<BarcodeResult>());
return;
}
}
if (image.isNull())
{
emit resultsReady(QList<BarcodeResult>());
return;
}
}
try
{
// Convert QImage to Dynamsoft-compatible format
QImage rgbImage = image.convertToFormat(QImage::Format_RGB888);
CImageData imageData(
rgbImage.sizeInBytes(),
rgbImage.bits(),
rgbImage.width(),
rgbImage.height(),
rgbImage.bytesPerLine(),
IPF_RGB_888
);
CCapturedResult *result = m_router->Capture(&imageData, CPresetTemplate::PT_READ_BARCODES);
if (result)
{
if (result->GetErrorCode() != EC_OK)
{
emit resultsReady(QList<BarcodeResult>());
}
else
{
CDecodedBarcodesResult *barcodeResult = result->GetDecodedBarcodesResult();
if (barcodeResult)
{
QList<BarcodeResult> results = convertResults(barcodeResult);
emit resultsReady(results);
}
else
{
emit resultsReady(QList<BarcodeResult>());
}
}
result->Release();
}
else
{
emit resultsReady(QList<BarcodeResult>());
}
}
catch (const std::exception &e)
{
emit resultsReady(QList<BarcodeResult>());
}
}
Critical Points in Image Processing:
-
Format Conversion: Dynamsoft requires
RGB888format for optimal performance -
Preset Templates: Using
PT_READ_BARCODESfor optimal detection settings
4.3 Result Conversion and Coordinate Extraction
QList<BarcodeResult> BarcodeWorker::convertResults(CDecodedBarcodesResult *pResult)
{
QList<BarcodeResult> results;
if (!pResult || pResult->GetErrorCode() != EC_OK)
{
return results;
}
int count = pResult->GetItemsCount();
for (int i = 0; i < count; i++)
{
const CBarcodeResultItem *barcodeItem = pResult->GetItem(i);
if (!barcodeItem)
continue;
BarcodeResult result;
result.format = QString::fromUtf8(barcodeItem->GetFormatString());
result.text = QString::fromUtf8(barcodeItem->GetText());
CQuadrilateral location = barcodeItem->GetLocation();
CPoint points[4];
location.points[0] = points[0];
location.points[1] = points[1];
location.points[2] = points[2];
location.points[3] = points[3];
for (int j = 0; j < 4; j++)
{
result.points.append(QPoint(points[j].coordinate[0], points[j].coordinate[1]));
}
results.append(result);
}
return results;
}
Step 5: Implementing Visual Overlay System
5.1 Image Display with Barcode Overlay
void MainWindow::updateImageDisplay(const QPixmap &pixmap, const QList<BarcodeResult> &results)
{
QPixmap displayPixmap = pixmap;
if (!results.isEmpty())
{
QPainter painter(&displayPixmap);
painter.setPen(QPen(Qt::green, 3));
painter.setFont(QFont("Arial", 12, QFont::Bold));
for (const auto &result : results)
{
if (result.points.size() >= 4)
{
// Draw bounding polygon
QPolygon polygon;
for (const auto &point : result.points)
{
polygon << point;
}
painter.drawPolygon(polygon);
if (!result.points.isEmpty())
{
int textWidth = painter.fontMetrics().horizontalAdvance(result.text);
QRect textRect(result.points[0].x(), result.points[0].y() - 20,
textWidth + 10, 20);
painter.fillRect(textRect, QColor(0, 255, 0, 180));
painter.setPen(Qt::black);
painter.drawText(result.points[0].x() + 5, result.points[0].y() - 5, result.text);
painter.setPen(QPen(Qt::green, 3));
}
}
}
}
ui->imageLabel->setPixmap(displayPixmap.scaled(ui->imageLabel->size(),
Qt::KeepAspectRatio,
Qt::SmoothTransformation));
}
5.2 Real-time Camera Overlay
connect(openCVCamera, QOverload<const QPixmap &>::of(&OpenCVCamera::frameReady),
this, [this](const QPixmap &pixmap)
{
if (useOpenCVCamera && cameraLabel && cameraLabel->isVisible() && !cameraUpdatesPaused) {
currentCameraFrame = pixmap;
QSize labelSize = cameraLabel->size();
if (labelSize.width() > 10 && labelSize.height() > 10) {
if (!currentCameraResults.isEmpty()) {
// Create overlay on current frame
QPixmap overlayPixmap = pixmap;
QPainter painter(&overlayPixmap);
painter.setRenderHint(QPainter::Antialiasing);
// Draw real-time barcode detection boxes
for (const auto &result : currentCameraResults) {
if (!result.points.isEmpty() && result.points.size() >= 4) {
QPen pen(Qt::green, 3);
painter.setPen(pen);
// Draw detection polygon
QPolygonF polygon;
for (const auto &point : result.points) {
polygon << point;
}
painter.drawPolygon(polygon);
// Draw format label
if (!result.format.isEmpty()) {
painter.setPen(QPen(Qt::yellow, 2));
QFont font = painter.font();
font.setPointSize(12);
font.setBold(true);
painter.setFont(font);
QPointF textPos = result.points.first();
textPos.setY(textPos.y() - 10);
painter.drawText(textPos, result.format);
}
}
}
painter.end();
QPixmap scaledPixmap = overlayPixmap.scaled(labelSize,
Qt::KeepAspectRatio,
Qt::SmoothTransformation);
cameraLabel->setPixmap(scaledPixmap);
} else {
// No overlay needed
QPixmap scaledPixmap = pixmap.scaled(labelSize,
Qt::KeepAspectRatio,
Qt::SmoothTransformation);
cameraLabel->setPixmap(scaledPixmap);
}
}
// Process frame for barcode detection
if (barcodeWorker) {
QImage image = pixmap.toImage();
barcodeWorker->processImage(image);
}
}
});
Step 6: OpenCV Camera Implementation
The application uses OpenCV exclusively for camera access, providing better reliability and cross-platform compatibility than Qt6 Multimedia.
6.1 Camera Initialization and Setup
void MainWindow::startCamera()
{
if (openCVCamera && openCVCamera->start(0))
{
// Show OpenCV camera display
if (cameraLabel)
{
cameraLabel->show();
}
ui->startCameraButton->setEnabled(false);
ui->stopCameraButton->setEnabled(true);
ui->resultsTextEdit->append("OpenCV camera started successfully!");
}
else
{
QStringList availableCameras = openCVCamera ? openCVCamera->availableCameras() : QStringList();
if (availableCameras.isEmpty())
{
ui->resultsTextEdit->append("No cameras detected by OpenCV");
}
else
{
ui->resultsTextEdit->append(QString("Available cameras: %1, but failed to start")
.arg(availableCameras.join(", ")));
}
}
}
6.2 OpenCV Camera Class Implementation
// opencvcamera.h
class OpenCVCamera : public QObject
{
Q_OBJECT
public:
explicit OpenCVCamera(QObject *parent = nullptr);
~OpenCVCamera();
bool start(int cameraIndex = 0);
void stop();
bool isActive() const { return active; }
bool isAvailable() const;
QStringList availableCameras() const;
signals:
void frameReady(const QPixmap &frame);
private slots:
void captureFrame();
private:
cv::VideoCapture capture;
QTimer *captureTimer;
bool active;
int currentCameraIndex;
};
6.3 Real-time Frame Processing
void OpenCVCamera::captureFrame()
{
if (!active || !capture.isOpened())
return;
cv::Mat frame;
if (capture.read(frame) && !frame.empty())
{
// Convert BGR to RGB for Qt
cv::Mat rgbFrame;
cv::cvtColor(frame, rgbFrame, cv::COLOR_BGR2RGB);
// Convert to QImage then QPixmap
QImage qImage(rgbFrame.data, rgbFrame.cols, rgbFrame.rows,
rgbFrame.step, QImage::Format_RGB888);
QPixmap pixmap = QPixmap::fromImage(qImage);
emit frameReady(pixmap);
}
}
Step 7: Building and Deployment
Create build.bat for easy building:
@echo off
echo Building Qt Barcode Scanner in Release mode...
REM Check for Qt6_DIR environment variable
if not defined Qt6_DIR (
echo Qt6_DIR environment variable not set. Searching for Qt installations...
REM Search common Qt installation paths
for %%d in (
"C:\Qt\6.7.2\msvc2022_64\lib\cmake\Qt6"
"C:\Qt\6.7.2\msvc2019_64\lib\cmake\Qt6"
"C:\Qt\6.6.0\msvc2022_64\lib\cmake\Qt6"
) do (
if exist %%d (
set "Qt6_DIR=%%~d"
echo Found Qt at: %%~d
goto :found_qt
)
)
echo Qt6 installation not found. Please install Qt6 or set Qt6_DIR manually.
pause
exit /b 1
)
:found_qt
echo Using Qt6_DIR: %Qt6_DIR%
set "CMAKE_PREFIX_PATH=%Qt6_DIR%\..\..\.."
echo Configuring CMake...
if not exist build mkdir build
cd build
cmake .. -DQt6_DIR="%Qt6_DIR%" -DOpenCV_DIR="%OpenCV_DIR%" -G "Visual Studio 17 2022"
if errorlevel 1 (
echo CMake configuration failed
pause
exit /b 1
)
echo Building project...
cmake --build . --config Release
if errorlevel 1 (
echo Build failed
pause
exit /b 1
)
echo Build completed successfully
echo Executable location: %CD%\bin\QtBarcodeScanner.exe
echo To run the application:
echo cd %CD%\bin
echo QtBarcodeScanner.exe
pause
Source Code
https://github.com/yushulx/cmake-cpp-barcode-qrcode-mrz/tree/main/examples/qt_barcode_scanner